from IPython import display
import numpy as np
import matplotlib.pyplot as plt
rnd = np.random.RandomState(seed=10)
Introduction & the Choice of an Objective Function
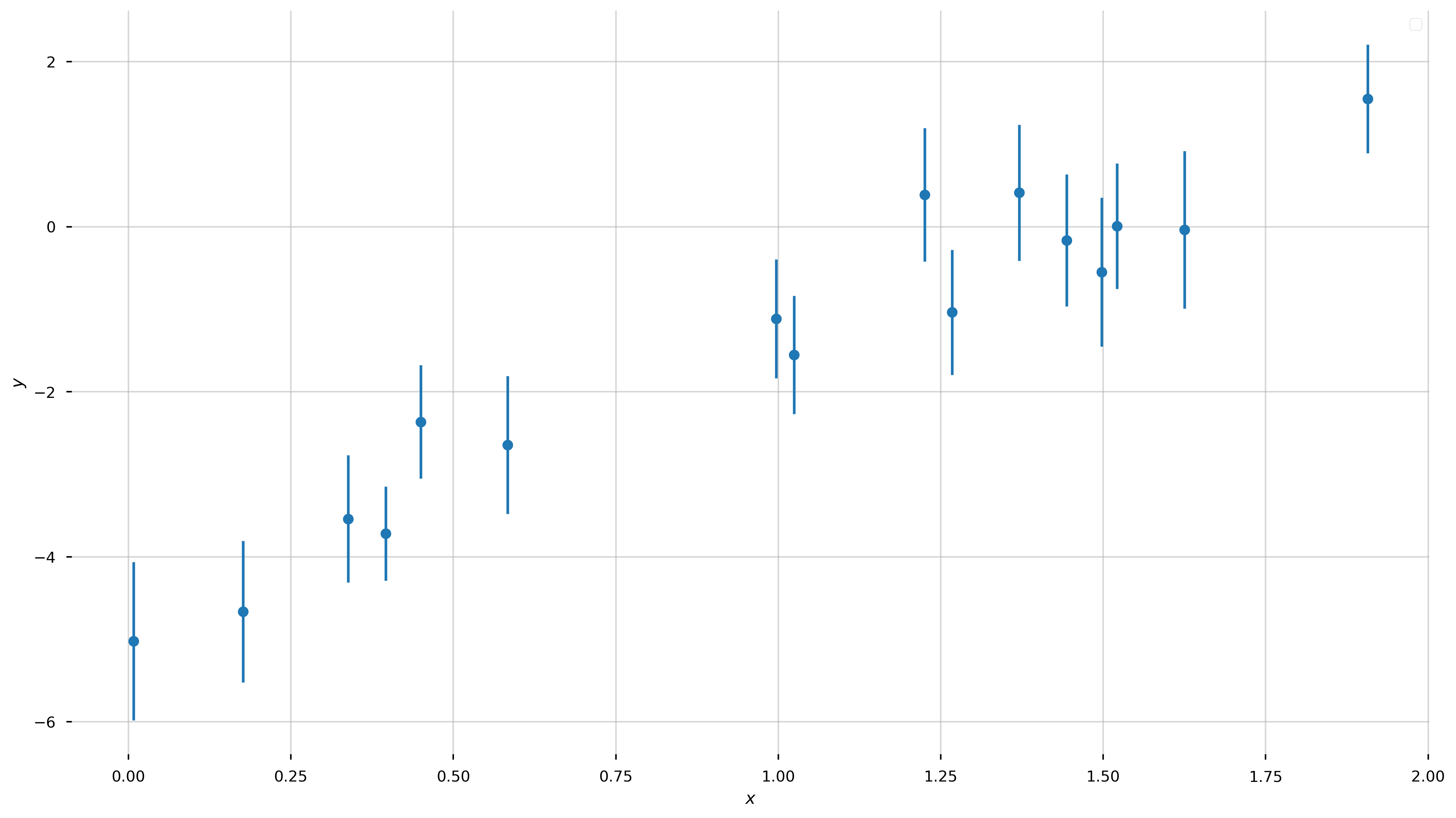
I want to start with a problem that everyone is probably familiar with or has at least seen before. The problem is this: we observe \(N\) independent data points \(\boldsymbol{y}=\{y_1,y_2,...y_N\}\) with uncertainties \(\boldsymbol{\sigma}=\{\sigma_1,\sigma_2,...\sigma_N\}\) at perfectly-measured values \(\boldsymbol{x}=\{x_1,x_2,...x_N\}\). We have reason to believe that the these data were generated by a process that is well-represented by a straight-line, and the only reason that the data deviate from this straight line is because of uncorrelated, Gaussian measurement noise in the \(y\)-direction. Let’s first generate some data that meet these qualifications:
n_data = 16 # number of data points
a_true = rnd.uniform(-2, 5) # randomly chosen truth
b_true = rnd.uniform(-5, 5)
print("The true a is {} and the true b is {}".format(a_true, b_true))
The true a is 3.399244502867222 and the true b is -4.792480506405985
Exercise 1:
- Randomly generate an array of uniformly-distributed
xvalues from the domain(0,2)with sizen_data - Sort the values in ascending order.
Solution:
# randomly generate some x values over some domain by sampling from a uniform distribution
x = rnd.uniform(0, 2., n_data)
x.sort() # sort the values in place
Execute the cell below to verify if you did it correctly.
# evaluate the true model at the given x values
y = a_true*x + b_true
# Heteroscedastic Gaussian uncertainties only in y direction
y_err = rnd.uniform(0.5, 1.0, size=n_data) # randomly generate uncertainty for each datum
y = rnd.normal(y, y_err) # re-sample y data with noise
fig = plt.figure(figsize=(16,9))
ax = plt.gca()
ax.errorbar(x, y, y_err, linestyle='none', marker='o')
ax.set_xlabel('$x$')
ax.set_ylabel('$y$')
Now let’s forget that we did that. We know nothing about the model parameters, except that we think the true values of the data are well-described by a linear relation! We would like to measure the “best-fit” parameters of this model (for a straight line, the slope and intercept \((a,b)\)) given the data above. In math, our model for the data \(y\) is: \(\begin{align} y &= f(x \,;\, a, b) + {\rm noise}\\ f(x \,;\, a, b) &= a\,x + b \end{align}\)
For a given set of parameters, \((a,b)\), we can evaluate our model \(f(x \,;\, a, b)\) at a given \(x\) location to compute the value of \(y\) that we would expect in the absence of noise. For example, for the \(n\)th datum—that is \((x_n, y_n)\)—and for a given set of parameter values \((a,b)\):
\[\hat{y}_n = f(x_n \,;\, a, b)\]Now, we somehow want to search through all possible values of \(a,b\) to find the “best” values, given the data, with some definition of “best.” When we say this word, we are implying that we want to optimize (find the maximum or minimum) some objective function (a function that takes our data, our model, and returns a quantification of “best”, usually as a scalar). Numerically, this scalar objective function can be any function (though you probably want it to be convex) and you will see different choices in practice. You have some leeway in this choice depending on whether your goal is prediction, discovery, or data compression.
However, for inference—the typical use-case for us as scientists—you don’t have this freedom: one of the conclusions of this talk is going to be that you have no choice about what “best” means! Before we get there, though, let’s explore what seem like reasonable choices.
Here are a few desirable features we’d like any objective function to have:
- For a given set of parameters, we should compare our predicted values to the measured values and base our objective function on the differences
- The scalar value should be dimensionless (the value of the objective function shouldn’t care if we use kilometers vs. parsecs)
- Data points that have larger errors should contribute less to the objective function (if a datum has a large offset from the predicted value, it shouldn’t matter if the datum has a large uncertainty)
- Convexity
To meet these three criteria, whatever objective function we choose should operate on the (dimensionless) quantities:
\[\chi_n = \frac{y_n - \hat{y}_n}{\sigma_n}\]i.e. the difference between our predicted values \(\hat{y}\) and the observed \(y\) values, weighted by the inverse uncertainties \(\sigma\). The uncertainties have the same units as the data, so this is a dimensionless quantity. It also has the nice property that, as we wanted, points with large uncertainties are downweighted relative to points with small uncertainties. Here are some ideas for objective functions based on this scalar:
-
Weighted absolute deviation: the sum of the absolute values
\[\sum_n^N \, \left|\chi_n\right|\] -
Weighted squared deviation: the sum of the squares
\[\sum_n^N \, \chi_n^2\] -
Weighted absolute deviation to some power \(p\):
\[\sum_n^N \, \left|\chi_n\right|^p\]
(Note: To a statistician, \(\chi^2\) is a distribution not a statistic…but physicists seem to use this terminology.)
For simplicity, let’s just compare two of these: the absolute deviation and the squared deviation. Both of these functions are convex and so we can pass them in to a naive optimizer to find the best parameters. Let’s first implement the functions, and then pass them in to the default scipy.optimize function minimizer.
Exercise 2:
Implement the functions to compute the weighted deviations below
Solution:
def line_model(pars, x):
"""
Evaluate a straight line model at the input x values.
Parameters
----------
pars : list, array
This should be a length-2 array or list containing the
parameter values (a, b) for the (slope, intercept).
x : numeric, list, array
The coordinate values.
Returns
-------
y : array
The computed y values at each input x.
"""
return pars[0]*np.array(x) + pars[1]
def weighted_absolute_deviation(pars, x, y, y_err):
"""
Compute the weighted absolute deviation between the data
(x, y, y_err) and the model points computed with the input
parameters (pars).
"""
chi = (y - line_model(pars, x)) / y_err
return np.sum(np.abs(chi))
def weighted_squared_deviation(pars, x, y, y_err):
"""
Compute the weighted squared deviation between the data
(x, y, y_err) and the model points computed with the input
parameters (pars).
"""
chi = (y - line_model(pars, x)) / y_err
return np.sum(chi**2)
Execute the cell below to verify if you did it correctly.
_pars = [1., -10.]
_x = np.arange(16)
_y = _x
_yerr = np.ones_like(_x)
truth = np.array(np.arange(-10, 6))
assert np.allclose(line_model(_pars, _x), truth), 'Error in line_model() function!'
assert weighted_absolute_deviation(_pars, _x, _y, _yerr) == 160., 'Error in weighted_absolute_deviation() function!'
assert weighted_squared_deviation(_pars, _x, _y, _yerr) == 1600., 'Error in weighted_squared_deviation() function!'
We can demonstrate that these are convex (over some domain) by computing the objective function values over a grid of parameter values (a grid in \(a, b\)):
# make a 256x256 grid of parameter values centered on the true values
a_grid = np.linspace(a_true-2., a_true+2, 256)
b_grid = np.linspace(b_true-2., b_true+2, 256)
a_grid,b_grid = np.meshgrid(a_grid, b_grid)
ab_grid = np.vstack((a_grid.ravel(), b_grid.ravel())).T
fig,axes = plt.subplots(1, 2, figsize=(16,9), sharex=True, sharey=True)
for i,func in enumerate([weighted_absolute_deviation, weighted_squared_deviation]):
func_vals = np.zeros(ab_grid.shape[0])
for j,pars in enumerate(ab_grid):
func_vals[j] = func(pars, x, y, y_err)
axes[i].pcolormesh(a_grid, b_grid, func_vals.reshape(a_grid.shape),
cmap='plasma',
vmin=func_vals.min(), vmax=func_vals.min()+256) # arbitrary scale
axes[i].set_xlabel('$a$')
# plot the truth
axes[i].plot(a_true, b_true, marker='o', zorder=10, color='#de2d26')
axes[i].axis('tight')
axes[i].set_title(func.__name__, fontsize=14)
axes[0].set_ylabel('$b$')
fig.tight_layout()
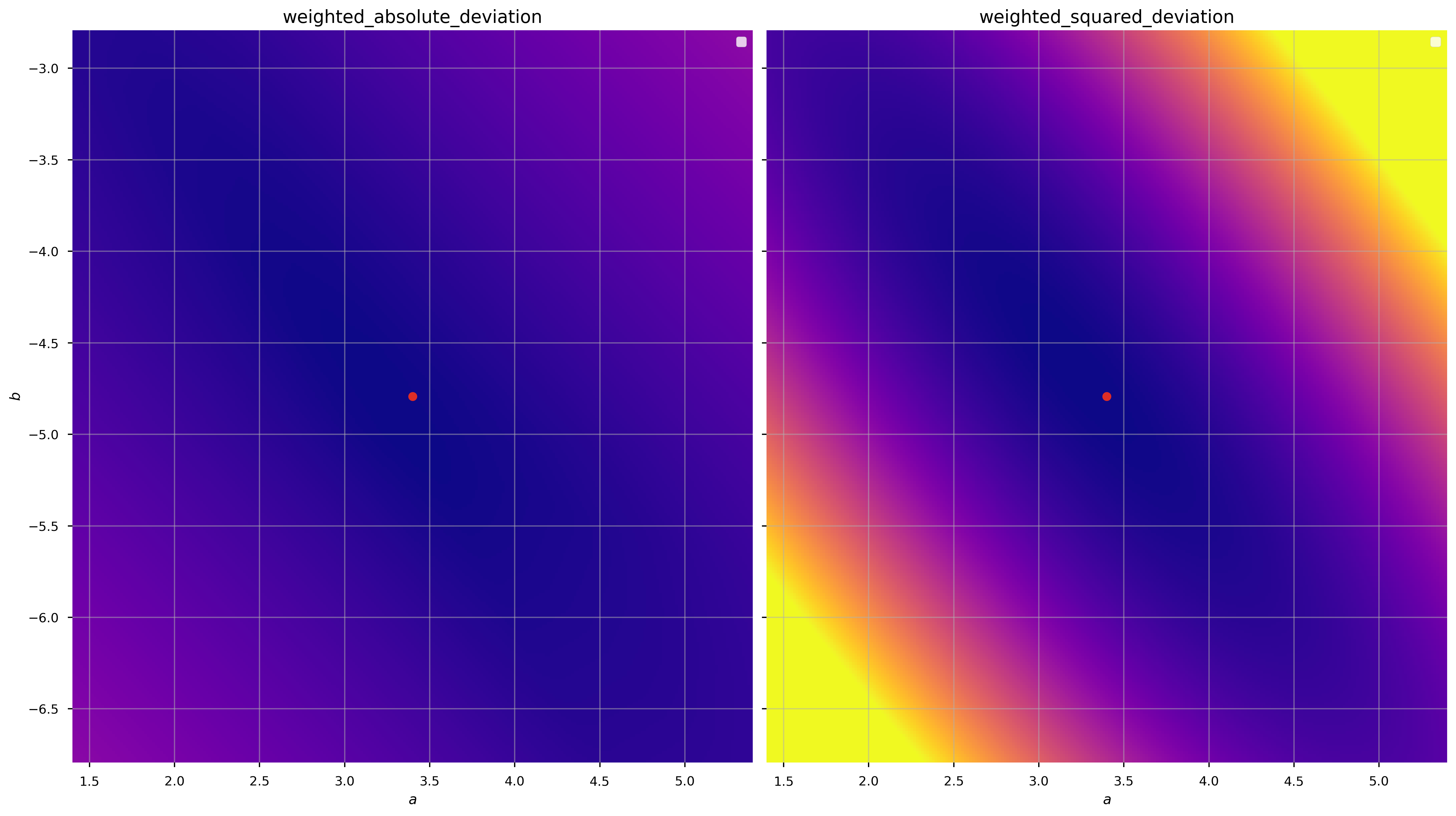
There are minima in both cases near the true values of the parameters (good), but the gradient of the function is clearly different (the color scales are the same in each panel above). Let’s see what happens when we minimize these objective functions to get the best-fit parameter values:
from scipy.optimize import minimize
x0 = [1., 1.] # starting guess for the optimizer
result_abs = minimize(weighted_absolute_deviation, x0=x0,
args=(x, y, y_err), # passed to the weighted_*_deviation function after pars
method='BFGS') # similar to Newton's method
result_sq = minimize(weighted_squared_deviation, x0=x0,
args=(x, y, y_err), # passed to the weighted_*_deviation function after pars
method='BFGS')
best_pars_abs = result_abs.x
best_pars_sq = result_sq.x
Let’s now plot our two best-fit lines over the data:
fig = plt.figure(figsize=(16,9))
ax = plt.gca()
ax.errorbar(x, y, y_err, linestyle='none', marker='o')
x_grid = np.linspace(x.min()-0.1, x.max()+0.1, 128)
ax.plot(x_grid, line_model(best_pars_abs, x_grid),
marker='', linestyle='-', label='absolute deviation')
ax.plot(x_grid, line_model(best_pars_sq, x_grid),
marker='', linestyle='-', label='squared deviation')
ax.set_xlabel('$x$')
ax.set_ylabel('$y$')
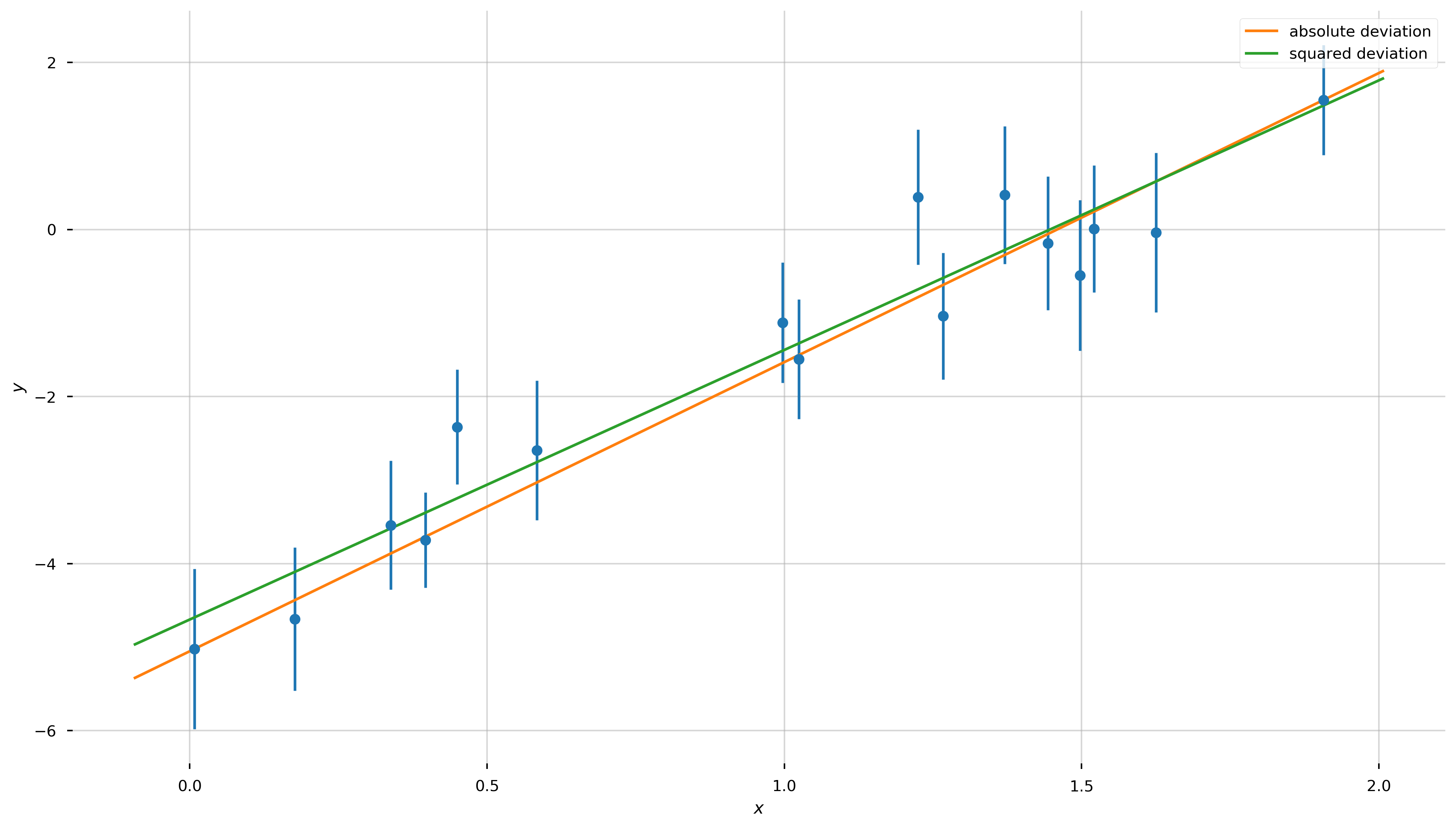
Well, by eye they both look reasonable! Are we done?! Not quite—how do we choose between the two?!
In order to pick between these two, or any of the arbitrary objective functions we could have chosen, we have to justify using one function over the others. In what follows, we’ll justify optimizing the sum of the squared deviations (so-called “least-squares fitting”) by thinking about the problem probabilistically, rather than procedurally.
Least-Squares Fitting
Let’s review the assumptions we made above in generating our data:
- The data were generated by a straight line
- Uncorrelated, known Gaussian uncertainties in \(y\) cause deviations between the data and predictions
- The data points are independent
- The \(x\) data are known perfectly, or at least their uncertainties are far smaller than the uncertainties in \(y\)
First off, these assumptions tell us that for each datum \((x_n, y_n)\) there is some true \(y_{n,{\rm true}}\), and because of limitations in our observing process we can’t observe the truth, but we know that the values we do observe will be Gaussian (Normal) distributed around the true value. (Note: This assumption tends to be a good or at least a conservative approximation in practice, but there are certainly more complex situations when, e.g., you have asymmetric uncertainties, or error distributions with large tails!).
In math:
\[\begin{align} p(y \,\mid\, y_{\rm true}) &= \mathcal{N}(y \,\mid\, y_{\rm true}, \sigma^2) \\ \mathcal{N}(y \,\mid\, y_{\rm true}, \sigma^2) &= (2\pi \sigma^2)^{-1/2} \, \exp\left(-\frac{1}{2} \frac{(y-y_{\rm true})^2}{\sigma^2} \right) \end{align}\]This is the likelihood of observing a particular \(y\) given the true \(y_{\rm true}\). Note that in our model, all of the \(y_{\rm true}\)’s must lie on a line. It is also interesting that the argument of the normal distribution looks a lot like \(\chi^2\)!
What about considering two data points, \(y_1\) and \(y_2\)? Now we need to write down the joint probability
\[p(y_1, y_2 \,\mid\, y_{1,{\rm true}}, \sigma_1, y_{2,{\rm true}}, \sigma_2)\]But, note that in assumption 3 above, we are assuming the data are independent. In that case, the random error in one point does not affect the random error in any other point, so the joint probability can be turned into a product:
\[p(\{y_n\} \,\mid\, \{y_{n,{\rm true}}\}, \{\sigma_n\}) = \prod_n^N \, p(y_n \,\mid\, y_{n,{\rm true}}, \sigma_n)\]This is the full expression for the likelihood of the observed data given the true \(y\) values. Recall that these true values, according to our assumptions, must lie on a line with some parameters, and we’re trying to infer those parameters! We can compute a particular \(y_{n,{\rm true}}\) using \(x_n\) and a given set of model parameters \(a, b\). With that in mind, we can write the likelihood instead as:
\[p(\{y_n\} \,\mid\, a, b, \{x_n\}, \{\sigma_n\}) = \prod_n^N \, p(y_n \,\mid\, a, b, x_n, \sigma_n)\]So what are the “best” values of the parameters \(a, b\)? They are the ones that maximize this likelihood!
The product on the right of the likelihood is a product over exponentials (well, Gaussians), which can be annoying to deal with. But, maximizing the likelihood is equivalent to maximizing the log-likelihood—so we can get rid of the product and all of those exponentials by taking the log of both sides:
\[\begin{align} \ln p(\{y_n\} \,\mid\, a, b, \{x_n\}, \{\sigma_n\}) &= \sum_n^N \, \ln\left[p(y_n \,\mid\, a, b, x_n, \sigma_n)\right] \\ &= \sum_n^N \ln \left[(2\pi \sigma_n^2)^{-1/2} \, \exp\left(-\frac{1}{2} \frac{(y_n-(a\,x_n+b))^2}{\sigma_n^2} \right) \right] \\ &= -\frac{N}{2}\ln(2\pi) - \frac{1}{2} \sum_n^N \left[\frac{(y_n-(a\,x_n+b))^2}{\sigma_n^2} + \ln{\sigma_n^2} \right] \end{align}\]In this case, the uncertainties are known and constant, so to maximize this expression we only care that (abbreviating the likelihood as \(\mathcal{L}\)):
\[\begin{align} \ln \mathcal{L} &= - \frac{1}{2} \sum_n^N \left[\frac{(y_n-(a\,x_n+b))^2}{\sigma_n^2}\right] + {\rm const.} \\ &= - \frac{1}{2} \sum_n^N \, \chi_n^2 + {\rm const.} \\ \end{align}\]Apparently, minimizing the sum of the weighted squared deviations is equivalent to maximizing the (log) likelihood derived from thinking about the probability of the data! Above, we did that minimization numerically using an iterative solver. That’s fine, but (a) it doesn’t directly give us the uncertainties on the inferred model parameters, and (b) there is actually an analytic way to solve this problem using linear algebra that is generally much faster!
Least-squares / maximum likelihood with matrix calculus
Using linear algebra, we can simplify and generalize a lot of the expressions above. In what follows, all vectors are column vectors and are represented by lower-case bold symbols. Matrices are upper-case bold symbols.
We’ll start by writing our model as a matrix equation. To do that, we need a way to, for a given set of parameters, compute the set of predicted \(y\)’s. This is done by defining the parameter vector, \(\boldsymbol{\theta}\), and a matrix typically called the design matrix, \(\boldsymbol{X}\):
\[\boldsymbol{\theta} = \begin{bmatrix} b \\ a \end{bmatrix} \quad \boldsymbol{X} = \begin{bmatrix} 1 & x_1 \\ 1 & x_2 \\ \vdots & \vdots \\ 1 & x_N \end{bmatrix}\](note the order of the parameters!). With these definitions, the vector of predicted \(y\) values is just
\[\boldsymbol{y}_{\rm pred} = \boldsymbol{X} \, \boldsymbol{\theta}\]so the deviation vector between the prediction and the data is just \((\boldsymbol{y}-\boldsymbol{X} \, \boldsymbol{\theta})\) where
\[\boldsymbol{y} = \begin{bmatrix} y_1 \\ y_2 \\ \vdots \\ y_N \end{bmatrix}\]But how do we include the uncertainties? We’ll pack the list of uncertainties (variances) into the trace of a 2D, \(N \times N\) matrix called the covariance matrix. Because we are assuming the uncertainties are independent, the off-diagonal terms are all zero:
\[\boldsymbol{\Sigma} = \begin{bmatrix} \sigma_1^2 & 0 & \dots & 0 \\ 0 & \sigma_2^2 & \dots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & 0 & \sigma_N^2 \end{bmatrix}\]With these matrices, we can write the expression for \(\chi^2\) (and therefore the log-likelihood) very concisely:
\[\begin{align} \chi^2 &= \left(\boldsymbol{y} - \boldsymbol{X}\,\boldsymbol{\theta}\right)^\mathsf{T} \, \boldsymbol{\Sigma}^{-1} \, \left(\boldsymbol{y} - \boldsymbol{X}\,\boldsymbol{\theta}\right) \\ \ln\mathcal{L} &= -\frac{1}{2}\left[N\,\ln(2\pi) + \ln|\boldsymbol{\Sigma}| + \left(\boldsymbol{y} - \boldsymbol{X}\,\boldsymbol{\theta}\right)^\mathsf{T} \, \boldsymbol{\Sigma}^{-1} \, \left(\boldsymbol{y} - \boldsymbol{X}\,\boldsymbol{\theta}\right) \right] \end{align}\]In this form, the terms in the \(\chi^2\) have a nice geometric interpretation: This looks like a distance between the data and the model computed with the metric \(\boldsymbol{\Sigma}\).
If you solve for the optimum of the log-likelihood function (take the derivative with respect to \(\boldsymbol{\theta}\) and set equal to 0), you find that:
\[\boldsymbol{\theta}_{\rm best} = \left[{\boldsymbol{X}^{T}} \, \boldsymbol{\Sigma}^{-1} \, \boldsymbol{X}\right]^{-1} \, {\boldsymbol{X}}^{T} \, \boldsymbol{\Sigma}^{-1} \, \boldsymbol{y}\]Getting the best-fit parameters just requires a few simple linear algebra operations! As an added bonus, we also get the uncertainties on the parameters. The \(2\times2\) covariance matrix for the best-fit parameters is given by the matrix:
\[C = \left[{\boldsymbol{X}}^{T} \, \boldsymbol{\Sigma}^{-1} \, \boldsymbol{X}\right]^{-1}\]Instead of using an iterative optimizer like scipy.optimize.minimize, let’s just write out the linear algebra explicitly and use numpy.linalg to solve this for us!
Optional Exercise:
Implement the necessary linear algebra to solve for the best-fit parameters and the parameter covariance matrix, defined above.
Solution:
# create matrices and vectors:
# learn this is a magical function - it makes exactly what we want for the design matrix
X = np.vander(x, N=2, increasing=True)
# OR:
# X = np.vstack((np.ones_like(x), x)).T
# you never want to do this in practice because the matrix will just be full of zeros!
# that's a good way to waste all of your RAM on storing zeros...
Cov = np.diag(y_err**2)
Cinv = np.linalg.inv(Cov) # we need the inverse covariance matrix
X.shape, Cov.shape, y.shape
((16, 2), (16, 16), (16,))
# we can also get the parameter covariance matrix
pars_Cov = np.linalg.inv(X.T @ Cinv @ X)
# using the new Python matrix operator
best_pars_linalg = pars_Cov @ (X.T @ Cinv @ y)
Let’s see how the parameter values compare to what we found using the numerical optimizer (we reversed the order for the linear algebra so we use [::-1] to reverse the array):
best_pars_sq - best_pars_linalg[::-1]
array([-3.67296402e-08, 1.39115022e-08])
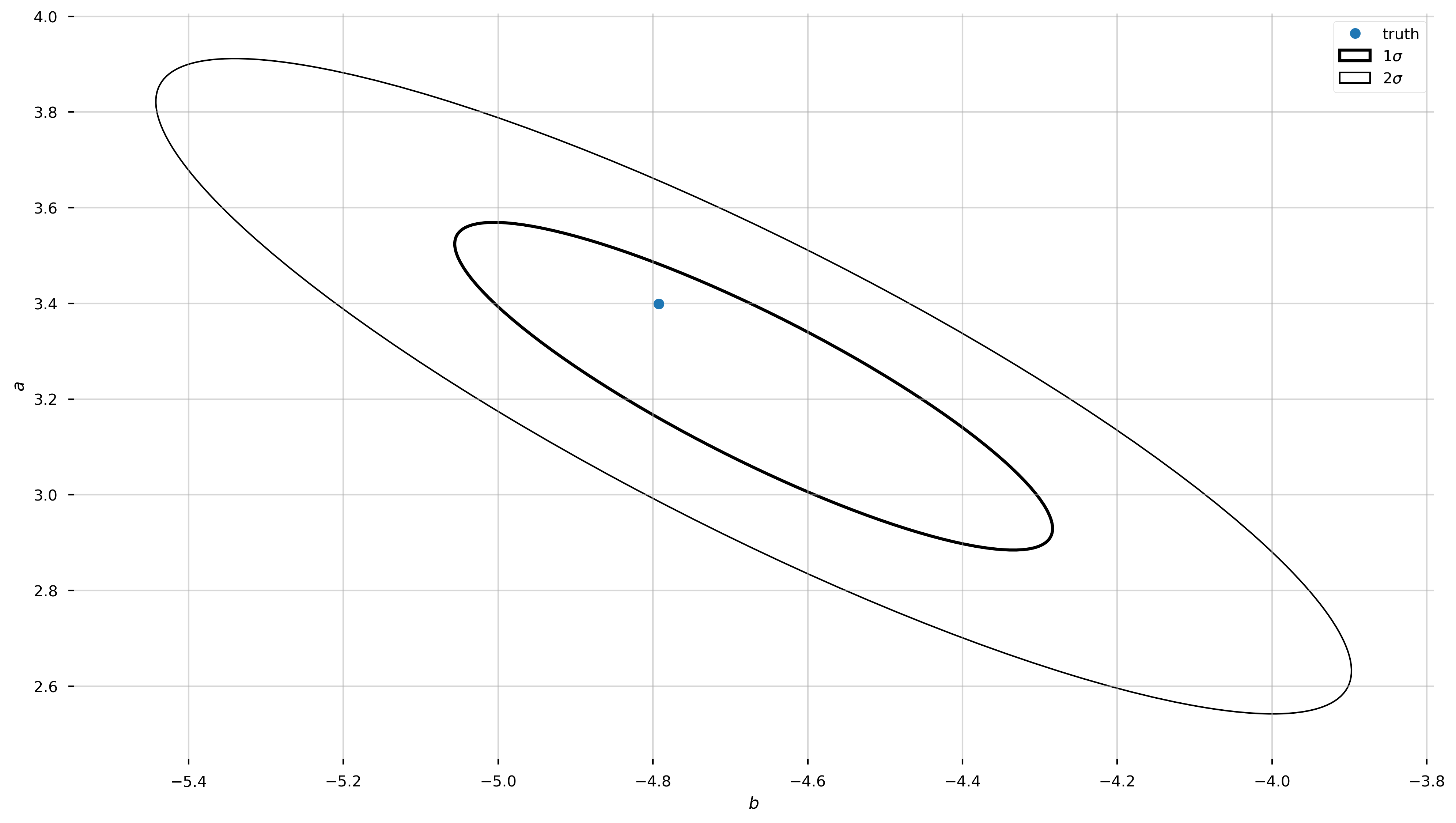
# some tricks to get info we need to plot an ellipse, aligned with
# the eigenvectors of the covariance matrix
eigval,eigvec = np.linalg.eig(pars_Cov)
angle = np.degrees(np.arctan2(eigvec[1,0], eigvec[0,0]))
w,h = 2*np.sqrt(eigval)
from matplotlib.patches import Ellipse
fig, ax = plt.subplots(1, 1, figsize=(16,9))
for n in [1,2]:
ax.add_patch(Ellipse(best_pars_linalg, width=n*w, height=n*h, angle=angle,
fill=False, linewidth=3-n,
label=r'{}$\sigma$'.format(n)))
ax.plot(b_true, a_true, marker='o', zorder=10, linestyle='none', label='truth')
ax.set_xlabel('$b$')
ax.set_ylabel('$a$')
ax.legend(loc='best')
Doing it again with Scipy
Above we saw how to implement our own least-squares estimator. We will use a function in scipy called scipy.optimize.curve_fit. Which uses non-linear least squares to fit a function to the data.
This function takes the following inputs,
scipy.optimize.curve_fit(f, x_data, y_data, p0=[ ], sigma=[ ])
where,
f: the function you want to find the optimal parameters forx_data: the x data to fity_data: the y data to fitp0: an array or list of initial guesses on each parametersigma: the error in the y measurements.
And returns two different arrays, (1) the optimal values of those parameters, popt, (2) the covariance matrix, pcov.
from scipy.optimize import curve_fit
def line_model(x, *pars):
a, b = pars
return a*x+b
Exercise 3
Implement curve_fit to fit our data.
Solution:
popt, pcov = curve_fit(line_model, x, y, p0=[1,1], sigma=y_err)
If you did it right, we can now inspect the optimal parameters and their associated statistical errors.
print(f"Optimal parameters: a={popt[0].round(2)}, b={popt[1].round(2)}")
print(f"Errors on each")
print(f"\t a : {np.sqrt(pcov[0,0]).round(5)}")
print(f"\t b : {np.sqrt(pcov[1,1]).round(5)}")
print("Z-score:")
print(f"\t a : {(a_true - popt[0]) / np.sqrt(pcov[0,0]) : .2f}σ")
print(f"\t b : {(b_true - popt[1]) / np.sqrt(pcov[1,1]) : .2f}σ")
Optimal parameters: a=3.23, b=-4.67
Errors on each
a : 0.23895
b : 0.26955
Z-score:
a : 0.72σ
b : -0.45σ
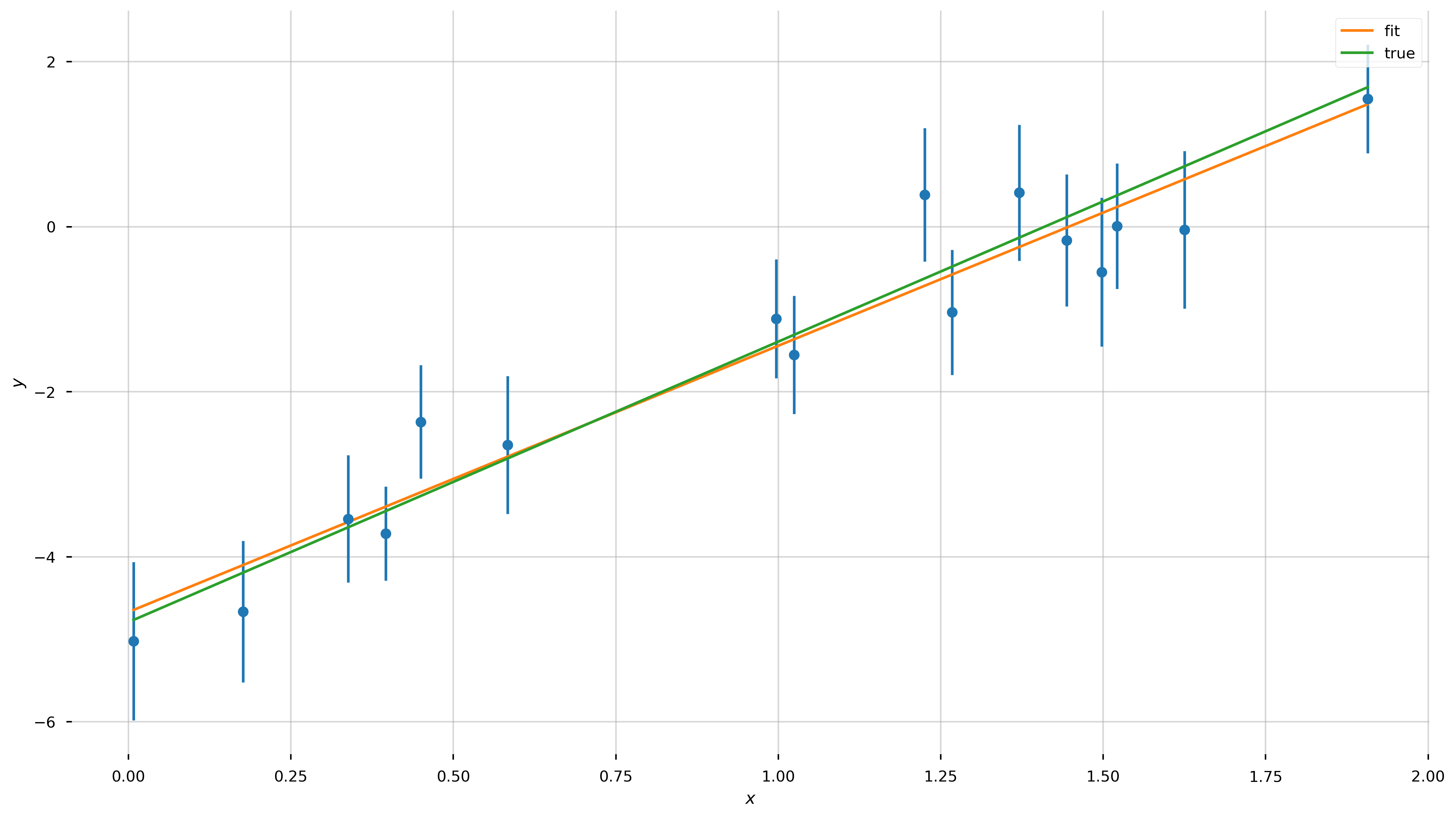
fig = plt.figure(figsize=(16,9))
ax = plt.gca()
ax.errorbar(x, y, y_err, linestyle='none', marker='o')
ax.plot(x, line_model(x, *popt), label='fit')
ax.plot(x, line_model(x, *[a_true, b_true]), label='true')
ax.set_xlabel('$x$')
ax.set_ylabel('$y$')
Fitting more complex functions
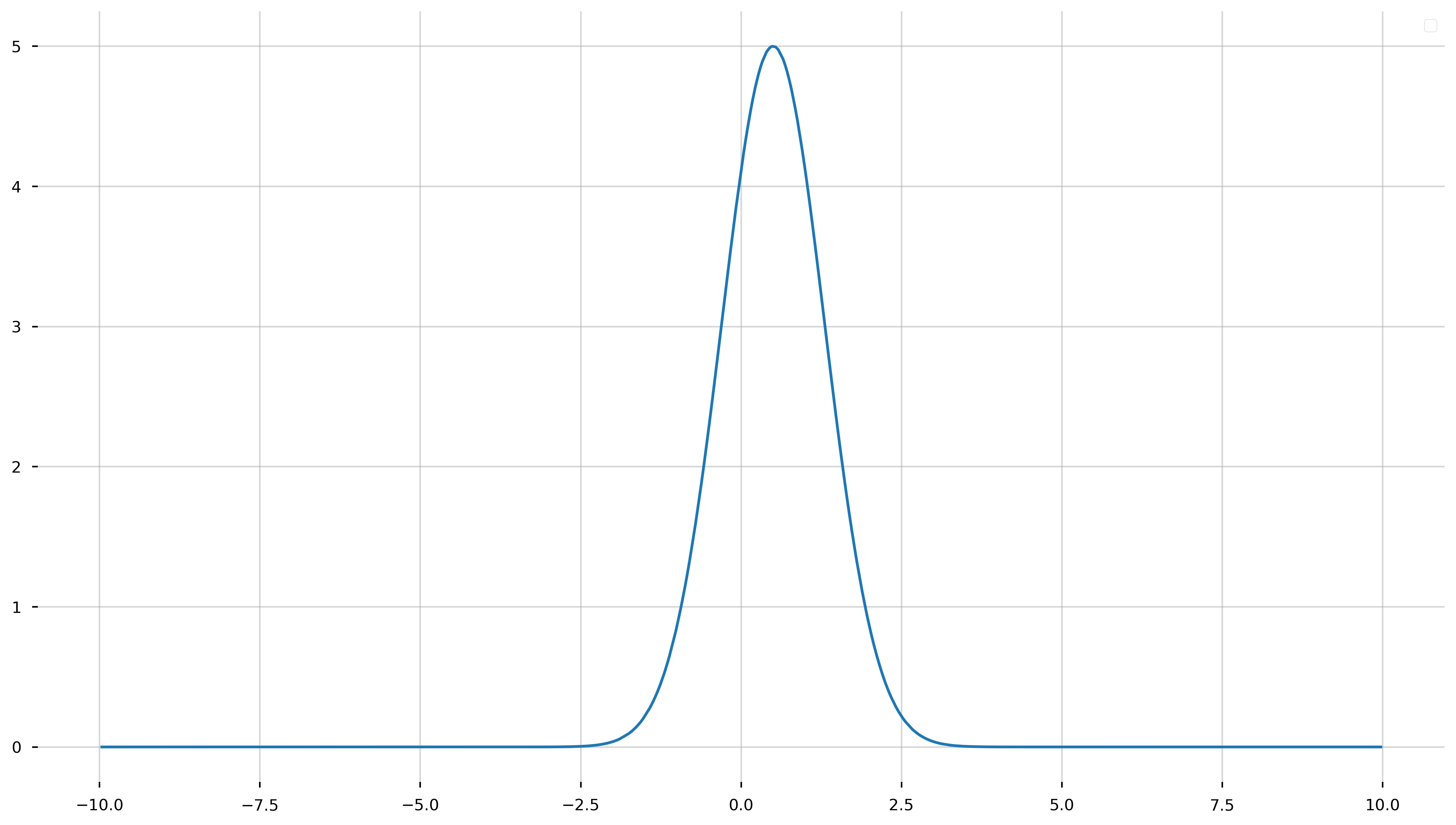
Before we tried to fit data generated from a rather simple model, a line. Now let’s see how to repeat this procedure for a more complicated function, such as a Gaussian. Recall, a Gaussian has the functional form,
\[f(x; A,b,c) = A\exp{-\frac{(x-b)^2}{2c^2}}\]As we have done previously, let’s generate some fake data to fit.
A_true = 5.
b_true = 0.5
c_true = 0.8
n_data = 100
x_model = rnd.uniform(-10, 10, size=1000)
x_model = np.sort(x_model)
f_model = lambda x: A_true*np.exp(-(x - b_true)**2/(2*c_true**2))
y_model = f_model(x_model)
fig = plt.figure(figsize=(16,9))
ax = plt.gca()
ax.plot(x_model, y_model)
restyle_fig(ax)
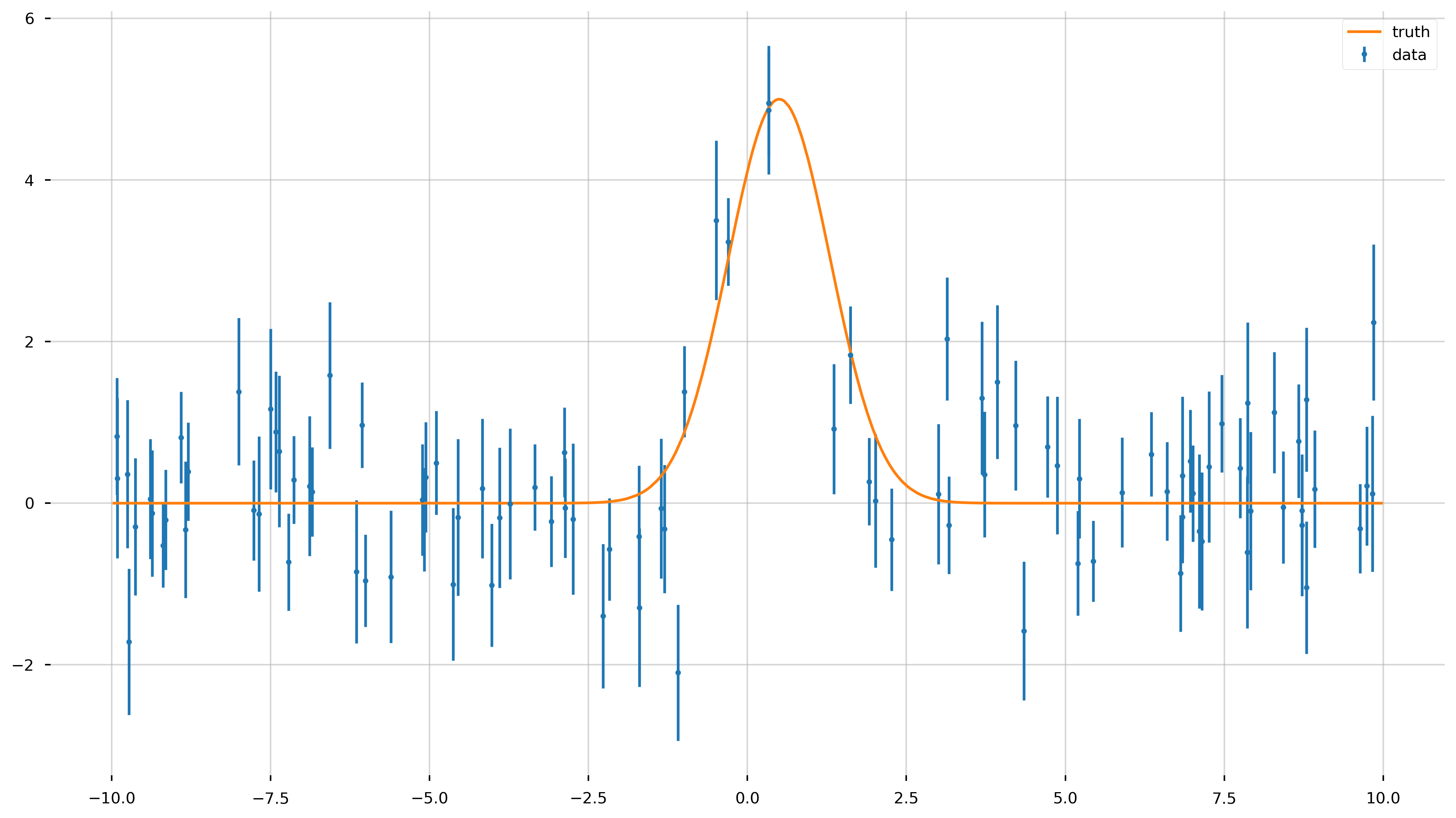
Now let’s add some Gaussian noise to the data.
x_data = rnd.uniform(-10, 10, size=n_data)
x_data = np.sort(x_data)
y_data = f_model(x_data)
y_err = rnd.uniform(0.5, 1.0, size=n_data) # randomly generate uncertainty for each datum
y_data = rnd.normal(y_data, y_err) # re-sample y data with noise
fig = plt.figure(figsize=(16,9))
ax = plt.gca()
ax.errorbar(x_data, y_data, yerr=y_err, fmt='.', label='data')
ax.plot(x_model, y_model, label='truth')
Just like before, let us forget that we generated the model, or know the true values of A, b, or c.
Excercise 4
Implement the function to act as our model to fit the data.
Solution:
def gauss_model(x, *params):
"""
Evaluate a Gaussian model at the input x values.
Parameters
----------
x : numeric, list, array
The coordinate values.
pars : list, array
This should be a length-3 array or list containing the
parameter values (A, b, c) for the ("amplitude", "offset", "width").
Returns
-------
y : array
The computed y values at each input x.
"""
A, b, c = params
return A*np.exp(-(x-b)**2/(2*c**2))
Run the following cell to see if you did it right! You should get some Gaussian looking function.
fig = plt.figure(figsize=(16,9))
ax = plt.gca()
_params = [1, 0, 5]
ax.plot(x_model, gauss_model(x_model, *_params))
Exercise 5
Use scipy.optimize.curve_fit() to fit a Gaussian to the data we generated (x_data, y_data, y_err)
Solution:
from scipy.optimize import curve_fit
p0 = [10, 0, 1]
popt, pcov = curve_fit(gauss_model, x_data, y_data, p0=p0, sigma=y_err)
Now, let’s see how good curve_fit did!
fig = plt.figure(figsize=(16,9))
ax = plt.gca()
ax.errorbar(x_data, y_data, yerr=y_err, fmt='.', label='Data')
ax.plot(x_model, y_model, color='b', label='Truth', lw=5, alpha=0.5)
ax.plot(x_model, gauss_model(x_model, *popt), color='r', label='Fit')
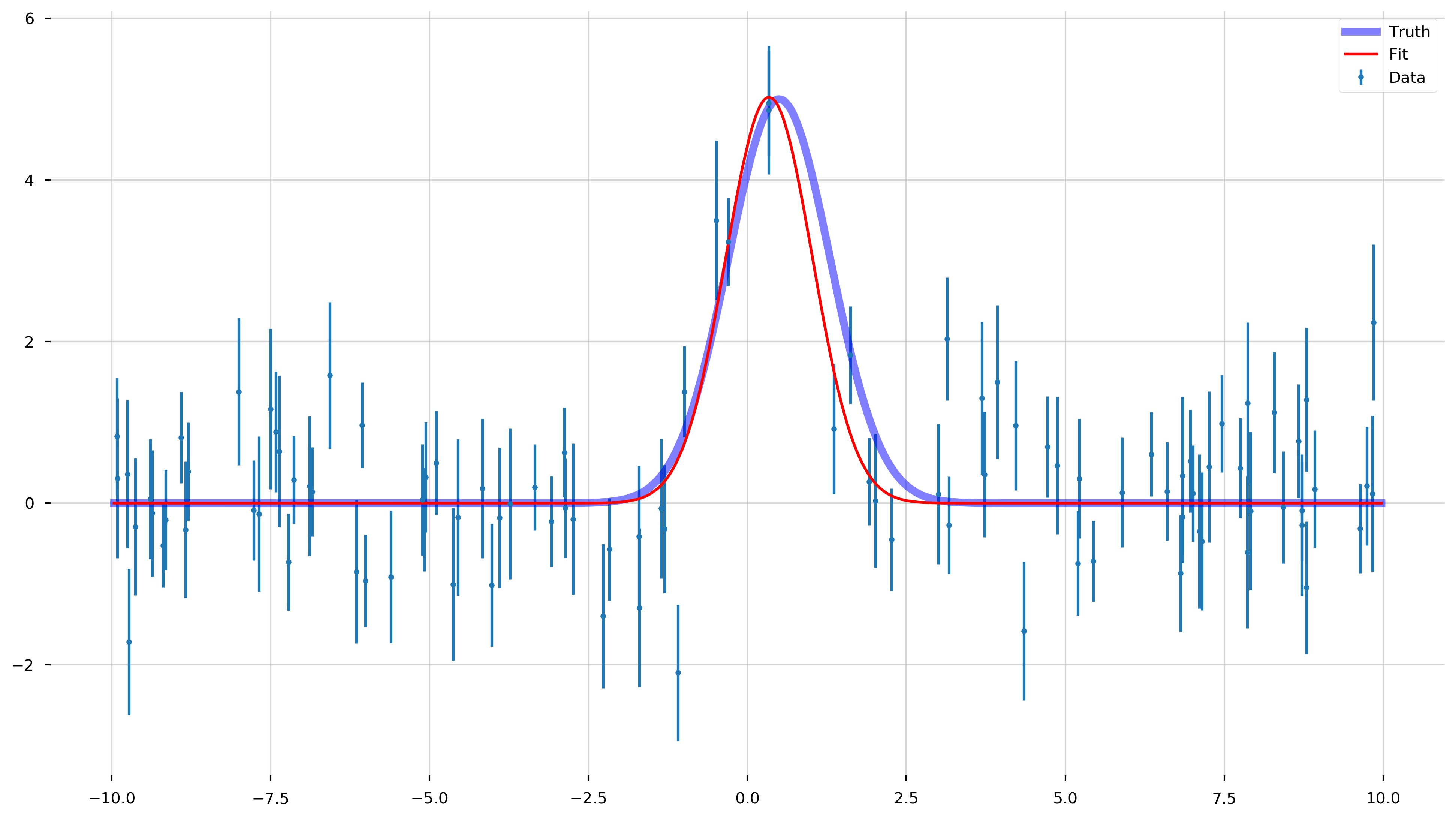
print(f"Optimal parameters: A={popt[0].round(2)}, b={popt[1].round(2)}, c={popt[2].round(2)}")
print(f"Errors on each")# ", B:{pcov[1,1].round(2)}, c:{pcov[2,2].round(2)}")
print(f"\t A : {pcov[0,0].round(5)}")
print(f"\t b : {pcov[1,1].round(5)}")
print(f"\t c : {pcov[2,2].round(5)}")
print("Z-score:")
print(f"\t A : {(A_true - popt[0]) / np.sqrt(pcov[0,0]) : .2f}σ")
print(f"\t b : {(b_true - popt[1]) / np.sqrt(pcov[1,1]) : .2f}σ")
print(f"\t c : {(c_true - popt[2]) / np.sqrt(pcov[2,2]) : .2f}σ")
Optimal parameters: A=5.02, b=0.34, c=0.68
Errors on each
A : 0.24278
b : 0.00806
c : 0.00436
Z-score:
A : -0.05σ
b : 1.78σ
c : 1.82σ